|
|
|
|
|
Moteur théorique. Entre les pôles d'un aimant tourne un cylindre ferreux (rotor) sur le pourtour duquel sont répartis des conducteurs, perpendiculairement au champ
de l'aimant (gros pointillé bleu, flèches rouges et vertes, et qui coupent le champs en travers).
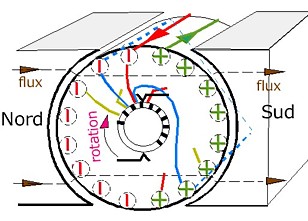
Le cylindre a un collecteur en son centre, constitué de lamelles de cuivre (en blanc) séparées par des isolants (noirs). Le fil bleu donne un exemple de câblage: le fil part d'une lamelle du collecteur, remonte sur la flasque avant du cylindre, traverse la surface ronde du cylindre, descend derrière la flasque arrière, retraverse la partie ronde opposée, est finalement soudé sur la lamelle suivante du collecteur. On recommence avec le fil suivant (rouge). Chaque tour de fil (spire) est ainsi soudé, sur une même lamelle, au tour de fil suivant; l'ensemble constitue finalement un bobinage unique, accessible par points grâce aux balais du collecteur. |
Comment le moteur tourne: les conducteurs sont alimentés en courant. Leurs segments représentés par les gros pointillé bleu, flèches rouges et vertes,
Si les conducteurs étaient tous parcourus par un courant de même sens, le rotor ne bougerait pas car ceux qui sont placés devant la pôle sud subiraient une force inverse de ceux qui sont placés devant le pôle nord. |
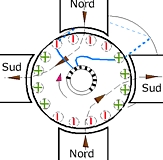 Les moteurs à plusieurs pôles alternent aimants Nord et Sud - ou
électroaimants - soit successivement un Nord, un Sud, un Nord..
Les enroulements du rotor doivent embrasser tout le flux du champ magnétique entre deux pôles Nord et Sud, mais pas plus. chaque spire ne ne se déploiera donc ici que sur 1/4 de tour et non
sur un demi comme ci-dessus. Chaque champ est maintenant coudé à 90 degrés.
Les moteurs à plusieurs pôles alternent aimants Nord et Sud - ou
électroaimants - soit successivement un Nord, un Sud, un Nord..
Les enroulements du rotor doivent embrasser tout le flux du champ magnétique entre deux pôles Nord et Sud, mais pas plus. chaque spire ne ne se déploiera donc ici que sur 1/4 de tour et non
sur un demi comme ci-dessus. Chaque champ est maintenant coudé à 90 degrés.
Seuls deux circuits de champ magnétique sont représentés pour ne pas surcharger le dessin (flèches marron), mais il n'y a pas de discontinuité et il y a bien des flux entre chaque pôle Nord et les deux Sud, vers la gauche et vers la droite. Les flèches devraient donc être doublées dans chacun des pôles pour mieux les représenter.
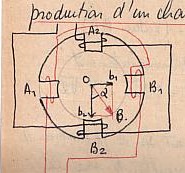
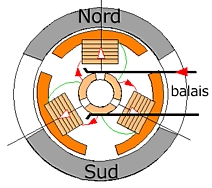 Fonctionnement d'un moteur à trois pôles alimentés.
Le moteur sans courant se positionne en équilibre des flux magnétiques comme ci-contre, soit une bobine et son pôle en pleine face de l'aimant Nord,
les deux autres en bas à gauche et à droite, à demi face. Par convention, lorsqu'une bobine est alimentée dans le sens fil rouge - fil vert , elle
crée un nord sur son pôle (partie circulaire orange). Fonctionnement d'un moteur à trois pôles alimentés.
Le moteur sans courant se positionne en équilibre des flux magnétiques comme ci-contre, soit une bobine et son pôle en pleine face de l'aimant Nord,
les deux autres en bas à gauche et à droite, à demi face. Par convention, lorsqu'une bobine est alimentée dans le sens fil rouge - fil vert , elle
crée un nord sur son pôle (partie circulaire orange).
Démarrage. On suppose que le balai supérieur du collecteur (tige noire avec flèche rouge) frotte sur deux secteurs du collecteur, comme indiqué. La bobine
supérieure est alors court-circuitée, la bobine droite, dont le fil rouge (flèche rouge) entre dans le bobinage avec un courant de même sens, crée un pôle nord
à demi face du pôle Sud (négatif) de l'aimant. La bobine gauche, dont le fil vert (flèche verte), entre dans le bobinage avec un courant inversé, crée un pôle sud
à demi face de ce même pôle sud. La bobine droite est attirée vers la gauche alors que la bobine gauche est repoussée dans la même direction. |
La fabrication de tels moteurs, surtout les plus petits à usage "approximatif" domestique, dont on n'attend guère de performance particulière, est bien trop onéreux.
Afin que les forces exercées soient importantes, les conducteurs représentés ici seraient en réalité remplacés des faisceaux de fils au câblage délicat, logé dans des rainures transversales du rotor.
Le modèle présenté ci-dessous est très simplifié et l'on peut voir que les conducteurs eux-mêmes, éloignés de la périphérie, ne satisfont pas à la théorie précédente.
Tout d'abord, les conducteurs éloignés de la périphérie n'offrent pas un bon couple par rapport à l'axe du rotor et ensuite, les deux deux brins d'une bobine sont proches et parcourus par deux courants
opposés dans un même champ. Enfin, il y a une dissymétrie entre le nombre de pôles du rotor et celui des aimants (trois pôles pour le rotor et deux pour le stator. Ce sont donc ici des flux magnétiques
qui s'attirent d'opposent ou s'attirent.
Un exemple de moteur à aimants. Ici la photo d'un de ces assez petits moteurs qui sont dans les brosses à dents électriques, ventilateurs de poche, râpes et polissoirs de
 manucure électrique, rasoirs à bouloches pour tissus etc. Ils fonctionnent
avec une ou deux piles 1,5 volts AA ou AAA. manucure électrique, rasoirs à bouloches pour tissus etc. Ils fonctionnent
avec une ou deux piles 1,5 volts AA ou AAA.Longueur, 2 cm. Dans la carcasse de ce moteur, deux aimants en arc de cercle produisent le flux magnétique (en rouge et en vert). |

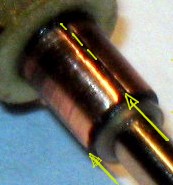
Rotor du moteur avec trois bobines de fil. Pour renforcer les flux magnétiques générés par les bobines, les fils sont enroulés autour de pièces métalliques (*).
Pièces métalliques des bobines, 1 cm de long - diamètre 1,4 cm.
|
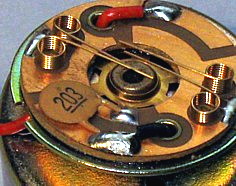
 La première fonction d'un collecteur est d'alimenter la partie tournante par contact glissant.
Deux "balais" frottent sur le collecteur pour apporter le courant continu. Sa deuxième fonction, pour les moteurs à courant continu, est d'inverser le courant dans les différentes
bobines (expliqué ci-dessus). La première fonction d'un collecteur est d'alimenter la partie tournante par contact glissant.
Deux "balais" frottent sur le collecteur pour apporter le courant continu. Sa deuxième fonction, pour les moteurs à courant continu, est d'inverser le courant dans les différentes
bobines (expliqué ci-dessus).Ici, le collecteur est composé de trois plaquettes de cuivre en arc de cercle, chacune étant isolée électriquement des autres. Une bobine a ses fils soudés sur deux lamelles consécutives. Comme dans l'exemple ci-dessus, le sens d'alimentation des bobines doit être inversé entre un passage côté pole Nord et le suivant côté pôle sud. |
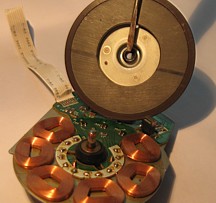
 Le moteur présenté ici est du même type que le précédent (ci-dessus), mais une fabrication plus soignée le classe dans la catégorie supérieure. Chez le premier, les balais sont de simple lames qui appuient
sur le collecteur. Ici, ce sont deux ressorts "boudin" par "balai", recouverts d'or, dont le nombre de spires assurent une pression bien contrôlée et constante sur le collecteur (photo de droite).
Les deux fils (balais), qui terminent les ressorts d'un même côté, sont de longueur inégale afin de prévenir tout accord de vibrations éventuelles (résonance), susceptibles de perturber les contacts.
Le moteur présenté ici est du même type que le précédent (ci-dessus), mais une fabrication plus soignée le classe dans la catégorie supérieure. Chez le premier, les balais sont de simple lames qui appuient
sur le collecteur. Ici, ce sont deux ressorts "boudin" par "balai", recouverts d'or, dont le nombre de spires assurent une pression bien contrôlée et constante sur le collecteur (photo de droite).
Les deux fils (balais), qui terminent les ressorts d'un même côté, sont de longueur inégale afin de prévenir tout accord de vibrations éventuelles (résonance), susceptibles de perturber les contacts.
|
Le rotor de ce moteur présente les mêmes qualités de fabrication. Les bobinages sont plus soignés et ne sont pas enroulés autour d'un pièce de fer feuilleté mais d'une matière plus perméable (composite) qui doit moins favoriser la création de courants parasites, induits dans sa propre masse. Les pôles sont aussi moins épais, mais cela tient aux aimants permanents, et au fait qu'il fonctionne sous une tension plus élevée. |
La Toyota Prius ancien modèle fonctionnait sous 274 volts continu ! je ne connais pas ce moteur mais il devait avoir un collecteur à secteurs,
comme tous les moteurs à courant continu. Les moteurs puissants n'ont pas de lamelles ni ressorts comme celui-ci, mais des "charbons" |

Si l'on empêche un moteur de tourner alors qu'il est alimenté en courant, il chauffe rapidement et peut brûler son collecteur et ses conducteurs si la puissance électrique fournie se maintient. On en conclut qu'il n'y a guère de risque avec un petit moteur à pile ! Que se passe t-il donc quand le moteur tourne ? il produit ce que l'on nomme une F.C.E.M, Force Contre Electromotrice qui s'opposant à la tension qui lui est appliquée, la réduit d'autant et par conséquence limite le courant. Les enroulements des moteurs sont constitués de fils assez gros pour pouvoir produire des champs intenses et leur résistance est généralement faible. Sans FCEM, le moteur est une résistance pure de faible valeur et il y a danger. A vide, le moteur ne fournit pas d'effort et la FCEM est maximale, presque égale à la tension d'alimentation et le moteur ne consomme presque rien. Plus on le charge et moins la FCEM agit, l'intensité augmente donc dans les bobinages ce qui est normal puisque un effort est fournit.
Le moteur à courant alternatif. C'est (ou c'était ?) le moins puissant des moteurs et il faut créer un artifice pour le faire démarrer, puis le synchroniser sur la fréquence du courant. Il est intéressant pour sa parfaite régularité puisqu'il suit la fréquence du courant. Bien des pendules branchées sur le courant 230 volts ont possédé un tout petit moteur de ce type et les programmateurs simples en ont encore un. Là ne s'arrête pas cependant son usage, car il a également bénéficié de larges progrès, témoin celui de la nouvelle Toyota Prius hybride, dont le premier moteur était à courant continu. Le moteur de la première Toyota PriusIl faut dire qu'autrefois, un moteur à courant alternatif ne fonctionnait que sur le secteur à 50 périodes par seconde (voir Physique 3, le courant alternatif), et un ensemble de bobines créait ce que l'on appelle un
champ tournant. Ce champ tournant peut être simplement représenté et visualisé par un aimant qui tourne.
Si on alimente des bobines fixes placées à l'intérieur d'un cylindre avec du courant alternatif, chaque pôle fixe change alternativement de polarité
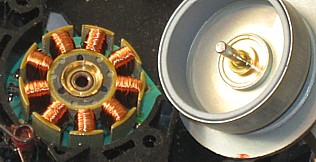
 Dans ce moteur, le champ est crée par quatre bobines.
Le rotor est constitué d'aimants permanents.
Deux bobines opposées sont parcourues par un même courant alternatif. Chaque paire est alimentée par un courant décalé de l'autre (déphasé d'une demi période, ce qui veut dire qu'ils s'opposent en sens de
circulation : l'un est au maximum
Dans ce moteur, le champ est crée par quatre bobines.
Le rotor est constitué d'aimants permanents.
Deux bobines opposées sont parcourues par un même courant alternatif. Chaque paire est alimentée par un courant décalé de l'autre (déphasé d'une demi période, ce qui veut dire qu'ils s'opposent en sens de
circulation : l'un est au maximum |
|
Les voitures des épreuves du trophée Andros. Fin janvier 2010, les voitures électriques du Trophée Andros (sur glace), ont ouvert officiellement le bal des "vraies" voitures électriques viables et fiables que l'on avait jusqu'alors pas vues; rude tâche pour cette grande première : 35 minutes de course sur glace à 160 km/h avec des accélérations fulgurantes ; moteurs de type asynchrone - sous toute réserve - à aimants permanents. Les pilotes ont adoré car la disparition de beaucoup de contraintes associées au "thermique", passage de vitesse, freinage, bruit, leur permettrait de mieux se concentrer sur une conduite.. acrobatique ! |
Les possibiltés de l'électronique-informatique a révolutionné le monde des moteurs spéciaux, en ouvrant de fabuleuses possibilités d'alimentation en courants variables "divers et variés".. Une autre révolution est arrivée par l'extraordinaire puissance d'aimantation que l'on peut induire en permanence dans le métal, y compris sur de tout petits volumes tels que les boutons de fermeture de sacs ! Je suppose que les recherches ont été initiées par la fabrication des disques durs d'ordinateurs, afin de positionner le bras-stylet sur des points micrométriques (il y a deux aimants extrêmemenet puissanrs).
Moteurs spécifiques.
|
Ces moteurs ont tous quelque chose en commun. |
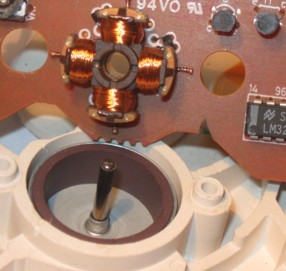 Voici une partie d'un moteur électrique : il s'agit à première vue d'un rotor mais c'est un stator fixé sur une plaquette de composants électroniques; il ne bouge pas du tout ! et
aucun collecteur ne distribue le courant ! en cliquant, vous verrez que ces bobines s'insèrent dans un cylindre magnétique (le rotor) qui, bien qu'uniforme d'apparence,
possède de nombreux pôles magnétiques sur son pourtour. Le champ tournant produit par le stator (les quatre bobines), fait tourner le rotor aimanté. Voir aussi le schéma ci-dessus; "production d'un champ tournant"
Voici une partie d'un moteur électrique : il s'agit à première vue d'un rotor mais c'est un stator fixé sur une plaquette de composants électroniques; il ne bouge pas du tout ! et
aucun collecteur ne distribue le courant ! en cliquant, vous verrez que ces bobines s'insèrent dans un cylindre magnétique (le rotor) qui, bien qu'uniforme d'apparence,
possède de nombreux pôles magnétiques sur son pourtour. Le champ tournant produit par le stator (les quatre bobines), fait tourner le rotor aimanté. Voir aussi le schéma ci-dessus; "production d'un champ tournant"
|
 Voici le même que le premier à gauche, mais avec 9 pôles au lieu de 4; bien
bobinés sur métal ferreux feuilleté, presque "à l'ancienne"; aucun collecteur ne distribue le courant non plus.
Les bobines produisent donc un champ tournant, comme pour tous les autres. Quel est le plus récent des deux celui à 9 pôles, plus sophistiqué et qui doit "tourner plus rond" ou celui à
4 ? Voici le même que le premier à gauche, mais avec 9 pôles au lieu de 4; bien
bobinés sur métal ferreux feuilleté, presque "à l'ancienne"; aucun collecteur ne distribue le courant non plus.
Les bobines produisent donc un champ tournant, comme pour tous les autres. Quel est le plus récent des deux celui à 9 pôles, plus sophistiqué et qui doit "tourner plus rond" ou celui à
4 ? Réponse: celui à 9 pôles faisait tourner le CD/DVD de ce lecteur laser 1 alors que celui à 4 pôles en actionne un plus récent ! voir page précédentePhysique 3.1 |
Ces moteurs "spécifiques" se distinguent par leur alimentation en électricité. Cette alimentation peut aller de la simple l'impulsion "pas à pas" à la variation de fréquence". Par rapport au moteur classique, c'est un grand pas car chez ce dernier seule la vitesse de rotation peut être contrôlée, par variation de la tension du courant qui lui est appliqué. Le moteur "piloté", c'est aussi des circuits électroniques complexes. Sans eux, il n'aurait pas existé. On le trouve dans les matériels informatiques (disques durs, lecteurs numériques..), ainsi que dans bien des matériels industriels, sans oublier les robots d'usines.
| Ce petit moteur d'imprimante à jet d'encre est un petit carré de métal feuilleté de 4 x 4 x 3 cm, serré par quatre vis aux angles. Il possède deux particularités : il ne tourne pas facilement, mais avec une bonne friction ! (comme un frein à vaincre). Et deuxièmement, il tourne par fraction de tour si faible qu'il est très difficile de ne pas sauter un cran ! (96 crans par tour). Voilà qui permet un positionnement ultra précis et ultra fin de ce qu'il déplace. | 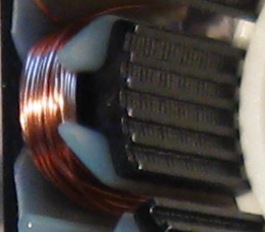
Il y a huit bobines, chacune d'elle produit une induction dans son noyau, pièce polaire qui s'évase en rectangle. Cette pièce polaire est crantée. On peut distinguer le feuilletage du métal du circuit magnétique (le carré) et ses 8 pôles (clic !), ceci afin de stopper les courants parasites qui y sont induits. |
 Le rotor, qui s'ajuste très serré dans le trou du stator, possède aussi les mêmes crans métalliques, mais en deux rangs décalés, ce qui revient du point de vue du positionnement, à doubler les 6 crans de chaque pièce polaire. Ce moteur fonctionne cran par cran (dit pas à pas) |
Montres à quartz avec aiguilles analogiques : les aiguilles sont animées par un moteur pas à pas super miniature. Ce moteur est alimenté par des impulsions électriques produites par un oscillateur électronique "calé" par quartz sur une fréquence de 32.768 hertz (cas d'une Seiko kinetic). On parvient à la seconde par réductions successives de la fréquence de l'oscillation électrique.
 Moteur de sortie d'objectif et de zoom d'appareil photo compact classique (années 2010) : dimensions réelles: 11 X 10 millimètres. Son axe fileté, à droite et en noir, entraîne une roue dentée (au-dessous), selon le principe de la réduction de vitesse par vis sans fin. La force qu'il exerce s'en trouve en contrepartie fortement augmentée |
 Ce moteur encore plus petit, soit 8 x 6 millimètres, est intégré dans le bloc télescopique de l'objectif, donc d'un côté des des lentilles. Il assure une mise au point précise sous le contrôle d'un
circuit électronique (système auto focus). Son axe à vis fait avancer ou reculer une lentille coulissante clic pour voir le bloc et la lentille à gauche). Le filetage de la vis se
voit à peine à l'œil nu ! Ce bloc principal de lentilles, contenu dans le plus gros tube extérieur coulissant, ne fait que 2,5 cm de diamètre.
Sable et embruns ne sont pas les amis de cette mécanique complexe.
Ce moteur encore plus petit, soit 8 x 6 millimètres, est intégré dans le bloc télescopique de l'objectif, donc d'un côté des des lentilles. Il assure une mise au point précise sous le contrôle d'un
circuit électronique (système auto focus). Son axe à vis fait avancer ou reculer une lentille coulissante clic pour voir le bloc et la lentille à gauche). Le filetage de la vis se
voit à peine à l'œil nu ! Ce bloc principal de lentilles, contenu dans le plus gros tube extérieur coulissant, ne fait que 2,5 cm de diamètre.
Sable et embruns ne sont pas les amis de cette mécanique complexe.
|
Moteur linéaire et Sustentation électromagnétique. Le moteur électrique linéaire va de pair avec la sustentation électromagnétique. Cette technologie s'applique actuellement aux trains électriques à grande vitesse, en Allemagne et au Japon; elle s'étendra sans doute à bien d'autres engins mobiles. La sustentation magnétique est un peu comme le coussin d'air des bateaux hovercraft; mais par le magnétisme, comme la boule qui semble flotter dans l'air. En raison de la caractéristique même du magnétisme, qui exige de très faibles espaces pour conserver une forte puissance, le problème est délicat car il ne faut pas que ça risque de frotter. L'autre difficulté était de réduire fortement la consommation de courant électrique qui aurait été prohibitive. Pour cela, on gèle très très fortement les conducteurs, de sorte qu'ils deviennent "supraconducteurs", perdant toute résistance ou presque. On peine à imaginer cela, mais c'est fait!
 
|




 Idées-perso.
Idées-perso.


 micro-ordinateur (PC)
micro-ordinateur (PC)
 Original, un moteur plat. Quelques bobines plates sur une plaquette de composants électroniques, aucun collecteur ne distribue le courant !
Original, un moteur plat. Quelques bobines plates sur une plaquette de composants électroniques, aucun collecteur ne distribue le courant !